获取鼠标当前位置
- 适用系统: windows / 信创
功能说明
功能描述
获取在机器人的运行过程中,执行该条指令时的鼠标位置
配置项说明
常规
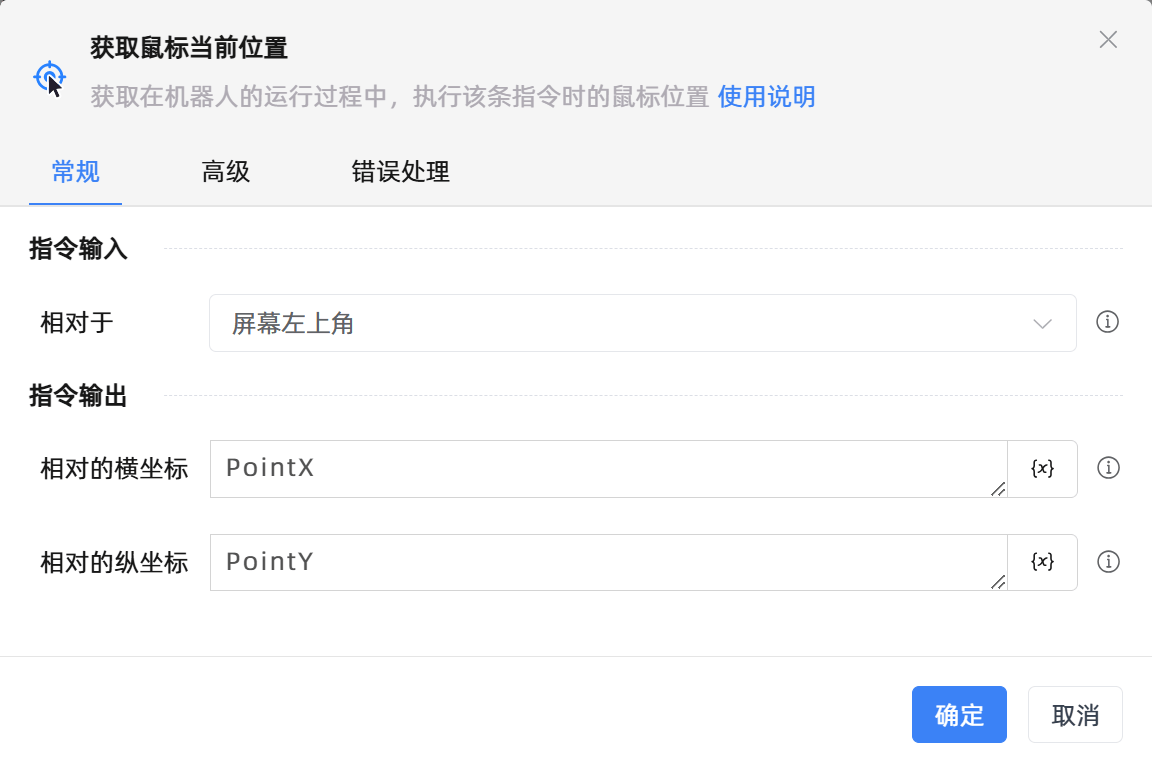
指令输入
- 相对于
Integer: 鼠标的位置
指令输出
相对的横坐标
Integer: 指定一个变量,用来保存当前鼠标位置的横坐标相对的纵坐标
Integer: 指定一个变量,用来保存当前鼠标位置的纵坐标
高级
- 执行前的延迟(毫秒)
Integer: 指令执行前的等待时间
错误处理
打印错误日志
Boolean:当指令运行出错时,打印错误日志到【日志】面板。默认勾选。处理方式
Integer:终止流程:指令运行出错时,终止流程。
忽略异常并继续执行:指令运行出错时,忽略异常,继续执行流程。
重试此指令:指令运行出错时,重试运行指定次数指令,每次重试间隔指定时长。
使用示例
无
常见错误及处理
无
常见问题解答
无